Du kannst Deinen RevPi Compact auch als Modbus-RTU-Master verwenden. Dadurch könntest Du z. B. Slaves, wie Temperaturfühler, Taster, Bewegungsmelder u. v. m. über Modbus RTU verbinden und die Daten dieser Slaves in Deinem RevPi Compact weiter verarbeiten.
Du benötigst dazu:
- RevPi Compact
- Slave
- Passende Kabel (je nach Projekt) mit D-Sub 9-Steckern
- Adapter (z. B. Shopartikel 200018 oder 200019)
- Internetverbindung
Voraussetzungen:
- Du hast einen Webbrowser auf Deinem PC installiert (z. B. Google Chrome oder Mozilla Firefox).
- RevPi Compact befindet sich in Deinem Netzwerk.
Los geht’s!
- Verbinde die eine USB-Buchse mit dem Adapter.
- Verbinde den Adapter über die D-Sub-9-Buchse mit den Slaves.
- Stelle die Adresse der Slaves ein und notiere Dir diese. Hinweise dazu findest Du ggf. in der Bedienungsanleitung des Herstellers.
- Ermittle den Gerätepfad Deines RevPi Compact und notiere Dir diesen. Hier erfährst Du, wie das geht.
- Öffne Deinen Webbrowser.
- Gib die IP-Adresse Deines RevPi Compacts in die Adresszeile Deines Browsers ein.
Das Anmelde-Fenster öffnet sich.
- Melde Dich mit dem Benutzernamen “admin” an.
- Gib Dein Passwort ein. Du findest es auf dem Aufkleber an der Seite Deines RevPi Compacts.
- Klicke auf “Login”.
Du siehst jetzt den aktuellen Gerätestatus Deines RevPi Compacts.
- Klicke auf das Register “Services”.
- Klicke auf “Enabled” in der Zeile Enable/Disable Modbus Master.
- Klicke auf den Button “Save All”.

Tipp!: Du kannst die Master-Funktion auch in der Kommandozeile aktivieren. Gib dazu folgendes Kommando ein: “sudo revpi-config enable pimodbus-master”
- Klicke auf das Register “Apps”.
- Klicke auf den Start-Button hinter dem Eintrag “PiCtory”.

PiCtory öffnet sich.
- Öffne im Device Catalog den Ordner “Virtual Devices”.
- Wähle den Modbus-RTU-Master aus.

- Halte die linke Maustaste gedrückt und ziehe den Modbus-RTU-Master auf Dein RevPi Compact.
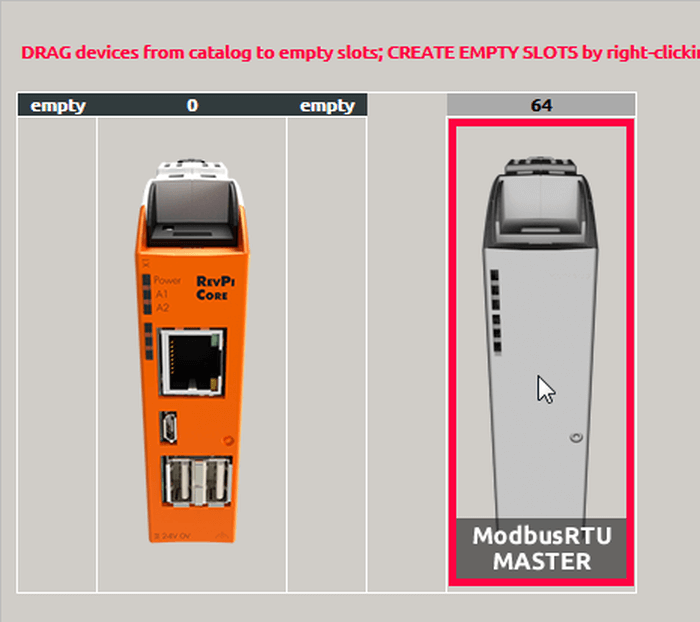
- Der Modbus-RTU-Master erscheint jetzt ganz außen auf dem Configuration Board.
- Klicke auf den Modbus-RTU-Master.
- Lege im Bereich „Device Data“ die Grundeinstellungen für Deine Adapter fest. Diese Eingabe ist optional. Wenn Du viele Geräte verwendest und die Daten später in einem anderen Programm weiterverarbeiten möchtest, kann diese Eingabe sehr hilfreich sein.
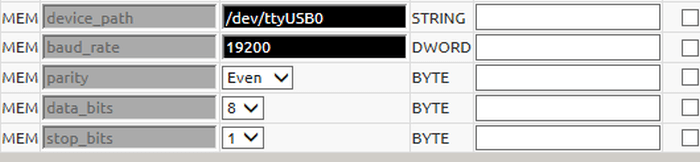
- Lege im “Value Editor” die Einstellungen für Deine RTU-Verbindung fest. Folgende Werte musst Du angeben:
| Parameter | Erklärung |
| Input | Hier kannst Du Deine Eingänge konfigurieren. Für jeden Master können insgesamt 32 Werte verwendet werden. Ein Wert ist 16 Bit breit. |
| Output | Hier kannst Du Deine Ausgänge konfigurieren. Für jeden Master können insgesamt 32 Werte verwendet werden. Ein Wert ist 16 Bit breit. |
| device_path | Der Dateipfad zur Linux Gerätedatei,default: /dev/ttyRS485.
Diesen Pfad hast Du ja bereits in den Vorbereitungen notiert. Falls nicht, erfährst Du hier wie Du ihn findest. Wichtig!: Wenn Du mehrere Geräte des gleichen Types verwendest, können sich die Pfade zu den Linuxgerätedateien bei einem Neustart ändern. Durch Setzen von udev-Regeln die z. B. Zuweisungen von Linuxgerätedateipfaden zu Geräteseriennummern haben, kann dies verhindert werden. |
| baud rate | Die Baudrate bestimmt die Geschwindigkeit der seriellen Verbindung. default: 19200 |
| parity | Konfiguration des Paritätsbit
None: kein Paritybit Even: gerade Parität (default) Odd: gerade Parität |
| data_bits | Anzahl der Datenbits default:8 |
| Stop_bits | Anzahl der Stopbits default:1 |
- Klicke mit der rechten Maustaste auf den Modbus-RTU-Master auf dem Configuration Board.
- Ein Kontextmenü öffnet sich.
- Wähle den Eintrag “Extended Data”.
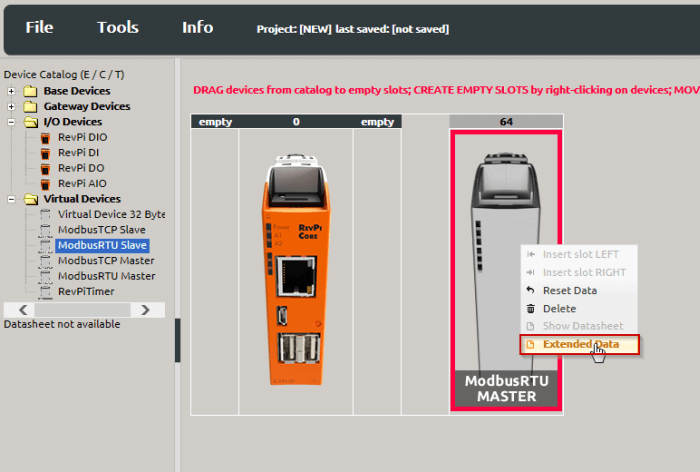
- Eine Eingabemaske öffnet sich.
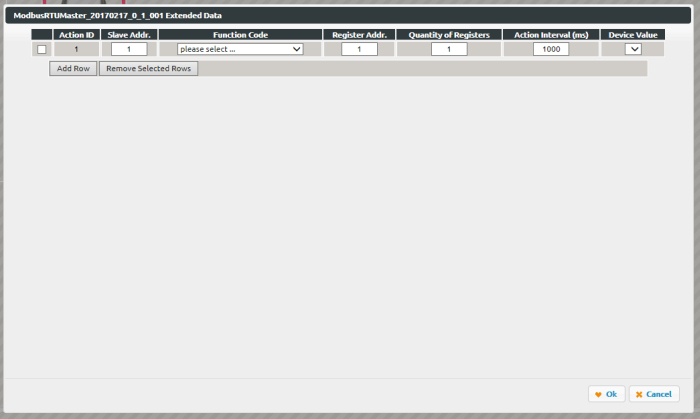
- Du kannst hier die Modbusbefehle einstellen.
| Parameter | Erklärung |
| Slave Addr. | Adresse des Slaves
Diese Adresse stellst Du direkt an Deinem verwendeten Slave ein. Informationen dazu, wie das geht, findest Du sicher in der Bedienungsanleitung des Herstellers. Wichtig!: Wenn Du mehrere Slaves verwendest, musst Du darauf achten, dass jeder Slave eine eigene Adresse hat. Wenn 2 oder mehr Slaves die gleiche Adresse haben, kommt es zu Fehlern in der Kommunikation. Die Adresse “0” darf nicht als Slave-Adresse verwendet werden. Sie ist bei Modbus für den Broadcast reserviert. |
| Function Code | Bei Modbus gibt es Function Codes, die den Zugriff auf Daten in einer bestimmten Weise möglich machen. Wir verwenden folgende Function Codes:
READ_COILS Einzelne Bits lesen
READ_DISCRETE_INPUTS Einzelnes Eingangs-Bit lesen
READ_HOLDING_REGISTERS Ein ganzes Ein/Ausgangsregister (16 Bit) lesen
READ_INPUT_REGISTERS Ein ganzes Eingangsregister (16 Bit) lesen
WRITE_SINGLE_COIL Einzelnes Bit schreiben
WRITE_SINGLE_REGISTER Ein ganzes Register schreiben
WRITE_MULTIPLE_COILS Mehrere aufeinanderfolgende Bits schreiben
WRITE_MULTIPLE_REGISTERS Mehrere aufeinanderfolgende Register schreiben |
| Register Address | Die Modbus-Registeradresse oder Bit-Adresse der Daten, auf die Du zugreifen möchtest. In der Bedienungsanleitung des Slaves findest Du die Information, wie die Register des Slaves belegt sind.
Die Registeradressen sind immer im Zusammenhang mit dem jeweiligen Function Code gültig. Das bedeuted, dass z. B. ein read holding register nr. 17 auf einen anderen Wert zugreift zu als ein read input register nr. 17. Bitte beachte bzgl. der Registeradresse den Hinweis unterhalb dieser Tabelle! |
| Quantity of Registers | Anzahl der Register(oder Bits) die gelesen/geschrieben werden |
| Action Interval | Der Intervall mit dem der Befehl gesendet wird (in Millisekunden)
Beachte, dass sehr kurze Intervalle bei zu hoher Systemlast nicht eingehalten werden können. Die Befehle werden dann, so schnell es die Gegebenheiten zulassen, gesendet. |
| Device Value | Der Variablenname im RevPi Prozessabbild, in dem das erste Word oder Bit des Modbusbefehls gelesen bzw. geschrieben wird
Stelle sicher, dass sich die einzelnen Befehle nicht überschneiden. |
Prüfe, wie die Adressierung bei Deinem Slave angegeben ist. Wenn der Slave, den Du verwenden möchtest, die 0 als erste Registeradresse verwendet, musst Du bei der Konfiguration zum angegebenen Wert eine 1 addieren.
Beispiel: In der Dokumentation zum Slave steht eine Registeradresse 30053. Die Adressen beginnen laut Doku bei 0. Du verwendest für dieses Register also die Adresse 30054 beim Konfigurieren eines Modbusbefehls.
Klicke auf „Add Row“, um einen weiteren Befehl hinzuzufügen.
Tipp!: Du kannst Befehle löschen, indem Du das Auswahlhäkchen am Anfang des Befehls setzt und auf “Remove Selected Rows” klickst.
- Klicke auf „File>Save“. Damit speicherst Du Deine Datei.
- Klicke auf „Tools>Reset Driver“. Damit aktivierst Du die Änderungen für den Adapter.
- Möchtest Du die Einstellungen in logiCAD3 oder C weiter verwenden?
- Dann klicke auf „File>Export“.
Ein Fenster öffnet sich. Du kannst hier das Format der Datei bestimmen und den Dateinamen angeben.
Du kannst aus 2 Formaten wählen:
Export 01 erzeugt eine Datei, die sich für die Verwendung in logiCAD3 eignet.
Export 02 erzeugt eine Offset Liste, die Du als Basisinformation für ein eigenes C-Programm verwenden kannst.
- Wähle ein Format aus, mit dem Du weiter arbeiten möchtest.
- Gib einen Dateinamen an.
- Klicke auf „Ok“.
Tipp!: 32 Werte sind zu wenig für Dein Projekt? Kein Problem, nimm einfach einen weiteren Master und greife mit diesem auf denselben Slave zu. Schon sind es 64 Werte.
Hilfe! Fehler!
Der Modbus-Master hat vorgegebene Modbus-Register für Statusmeldungen.
Tritt ein Kommunikationsfehler auf, wird der Fehlercode in das Modbus-Register „Modbus_Master_Status“ geschrieben.
Der Fehler bleibt so lange in diesem Register, bis man manuell in das Modbus-Register „Master_Status_Reset“ den Wert „1“ schreibt.
| Fehlercode | Bedeutung |
| 0x10 | Das konfigurierte Gerät wurde nicht gefunden.
Überprüfe, ob die Verkabelung stimmt. |
| 0x11 | Das konfigurierte Gerät antwortet nicht oder Du verwendest eine beim Slave nicht zugelassene Registeradresse (siehe Hinweis weiter oben!).
Überprüfe, ob die Konfiguration/Verkabelung stimmt. |
Der Modbus-Master kann bis zu 32 Aufgaben übernehmen. Für jede Aufgabe gibt es je ein Register für Status und Status Reset. Tritt ein Fehler in einer Aufgabe auf, wird der Fehlercode in das Modbus-Register „Modbus_Action_Status_[1 … 32]“ geschrieben.
Der Fehler bleibt so lange in diesem Register, bis man manuell in das Modbus-Register „Action_Status_Reset_[1 … 32]“ den Wert „1“ schreibt.
Die Fehlercodes entsprechen den Modbus-Exception-Codes wie sie in der Modbus-Spezifikation angegeben sind.
In der folgenden Tabelle werden die wichtigsten Fehlermeldungen angegeben.
| Fehlercode | Name | Bedeutung |
| 0x01 | ILLEGAL FUNCTION | Der verwendete Functioncode ist nicht erlaubt. Prüfe, ob Du den richtigen Functioncode verwendest. |
| 0x02 | ILLEGAL DATA ADDRESS | Die verwendete Modbus-Registeradresse ist nicht gültig. Das Register ist entweder schreibgeschützt oder ungültig. Überprüfe die Registeradresse. |
| 0x03 | ILLEGAL DATA VALUE | Mindestens ein Teil der verwendeten Datenwerte ist ungültig. Es wäre z. B. möglich, dass Du eine zu hohe Registeranzahl angegeben hast. Prüfe Deine Werte. |
| 0x11 | Resource temporarily unavailable | – |
| 0x12 | INVALID CRC | Vom Slave wurde ein gestörtes Paket empfangen. Das kann z.B. auftreten nachdem die Verbindung unterbrochen wurde. Prüfe deine Verkabelung. |
| 0x13 | INVALID DATA | Vom Slave wurde ein unvollständiges Paket empfangen. Das kann z.B. auftreten nachdem die Verbindung unterbrochen wurde. Prüfe deine Verkabelung. |
| 0x104 | Connection reset by peer | – |
| 0x110 | CONNECTION TIMED OUT | Der Slave hat nicht schnell genug oder gar nicht geantwortet. Prüfe Deine Konfiguration und Verkabelung. |
Mehr zu diesem Thema findest Du in der Spezifikation von Modbus.