Die Applikation PiCtory erstellt und verwaltet die Konfigurationsdatei eines Revolution Pi Systems, also für ein RevPi Basismodul mit Erweiterungsmodulen. Die Systemzusammenstellung kann entsprechend ihrer physikalischen Anordnung auf der Hutschiene über einen Browser verwaltet werden.
Über die Konfigurationsdatei wird definiert, welche Erweiterungsmodule sich an welcher Position in Bezug auf das RevPi Basismodul befinden und wie alle verwendeten Ein- und Ausgänge benannt und konfiguriert sind. Die Konfigurationsdatei kann diese Systemeinstellung auch für andere Programme zur Verfügung stellen.
Zusätzlich zu den physikalischen Erweiterungsmodulen können Virtual Devices für gängige Netzwerkprotokolle eingebunden werden.
PiCtory starten #
Ab dem RevPi Bookworm Image wird PiCtory über die vorinstallierte Applikation Cockpit gestartet.
▷ Wechsle ins Menü RevPi Configuration.
▷ Klicke im Bereich RevPi Apps auf Open für PiCtory.
❯❯ PiCtory öffnet sich in einem neuen Browser-Tab.
Bis zum RevPi Bullseye Image wird PiCtory über die Applikation RevPi Status, auch Webstatus genannt, gestartet, siehe: Geräteinformation abfragen.
Geräte anordnen (Device Catalog) #
Im Device Catalog werden alle verfügbaren RevPi Geräte und die Virtual Devices gelistet.
Auf dem Configuration Board können die einzelnen RevPi Geräte des Revolution Pi Systems so zusammengestellt werden, wie sie physisch auf der Hutschiene angeordnet sind, siehe: Regeln für die Geräteanordnung.
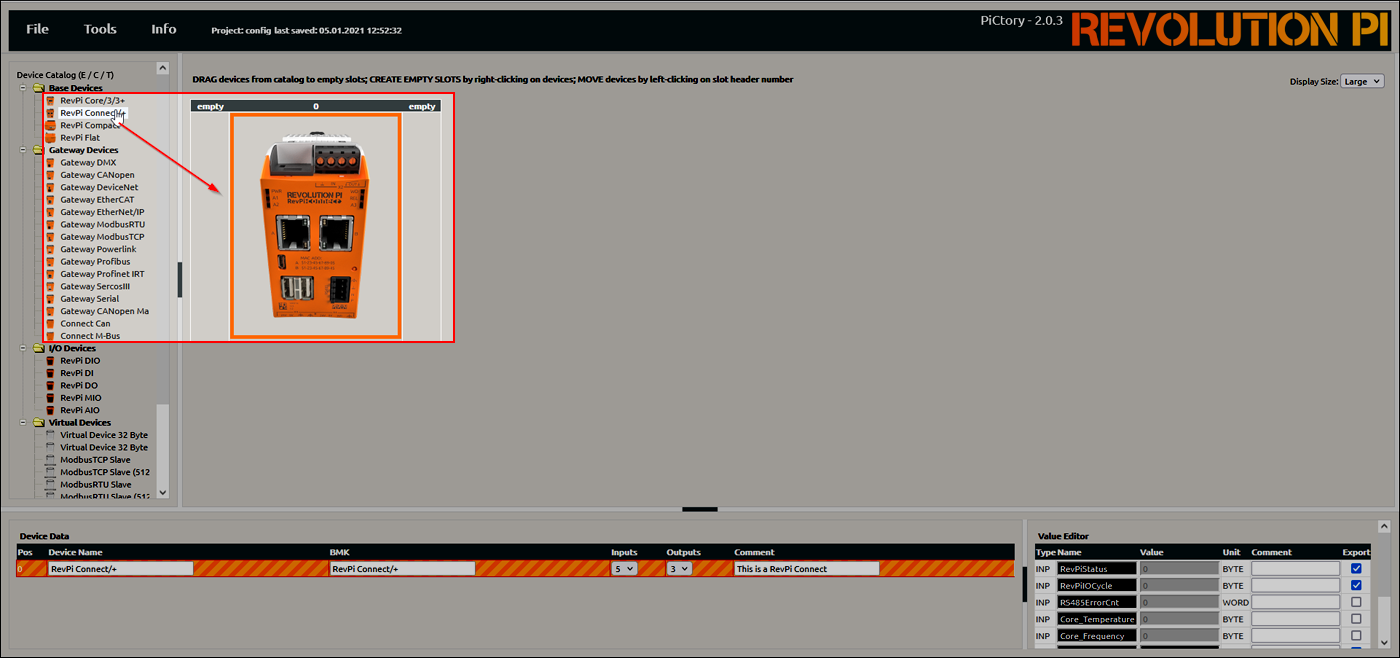
▷ RevPi Basismodul aus dem Device Catalog wählen und per Drag-and-Drop auf den leeren Slot mit der Positionsnummer 0 ziehen.
❯ PiCtory lädt das gewählte Basismodul auf das Configuration Board und erstellt neue leere Slots.
▷ Die weiteren Geräte links oder rechts auf das Configuration Board ziehen.
▷ Mit Klick auf die Positionsnummer lassen sich die Slots verschieben.
▷ Mit Rechtsklick > Delete wird ein Gerät wieder entfernt.
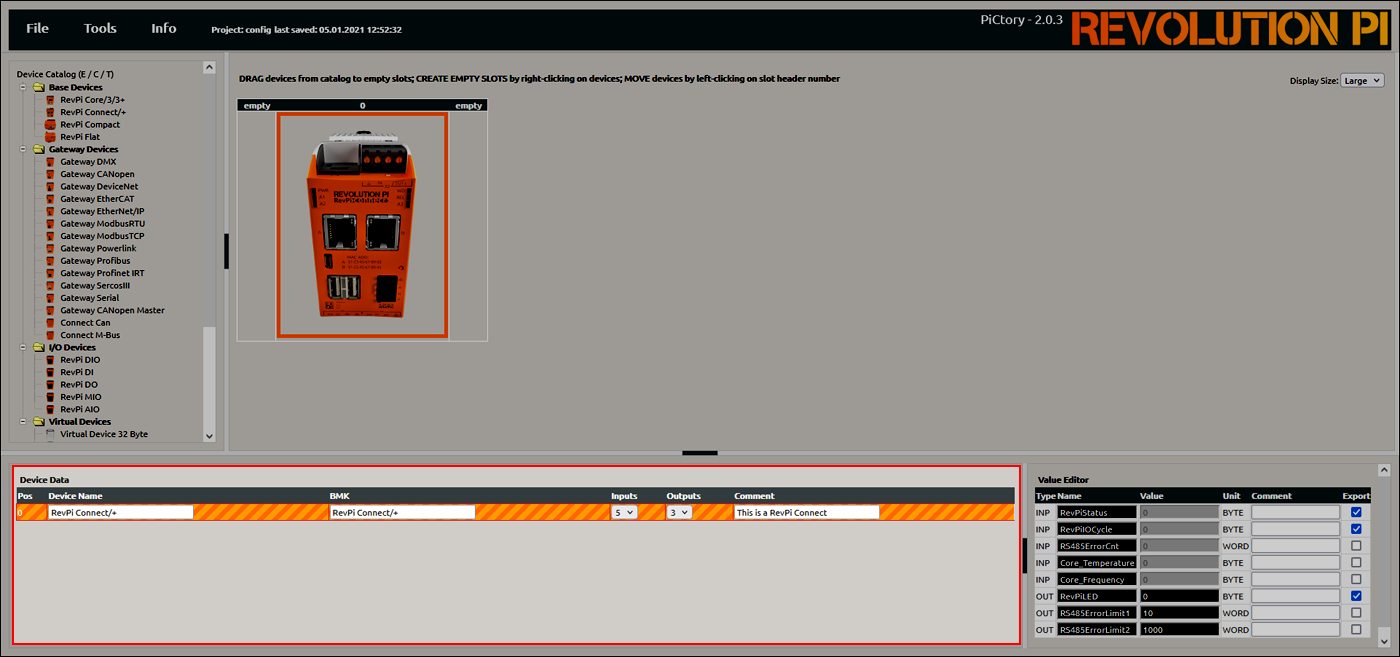
Basiskonfiguration der Geräte (Device Data) #
Im Bereich Device Data können die Grundeinstellungen für das aktuell im Configuration Board markierte Gerät konfiguriert werden.
| Feld | Beschreibung |
|---|---|
Device Name |
Gerätenamen ändern, falls viele Geräte verwendet werden und die Systemdaten später in einem anderen Programm weiterverarbeitet werden. |
BMK |
Falls erforderlich, Betriebsmittelkennzeichen angeben. |
Inputs/Outputs |
Datenschema für die Ein-und Ausgänge definieren. Wähle den höheren Wert für die Bool-Variable oder den niedrigen für die 16-Bit-Variable. |
Comment |
Falls erforderlich, Kommentarspalte für zusätzliche Informationen verwenden. |
Werden keine Werte eingegeben, verwendet PiCtory die in der RAP-Datei hinterlegten Werte.
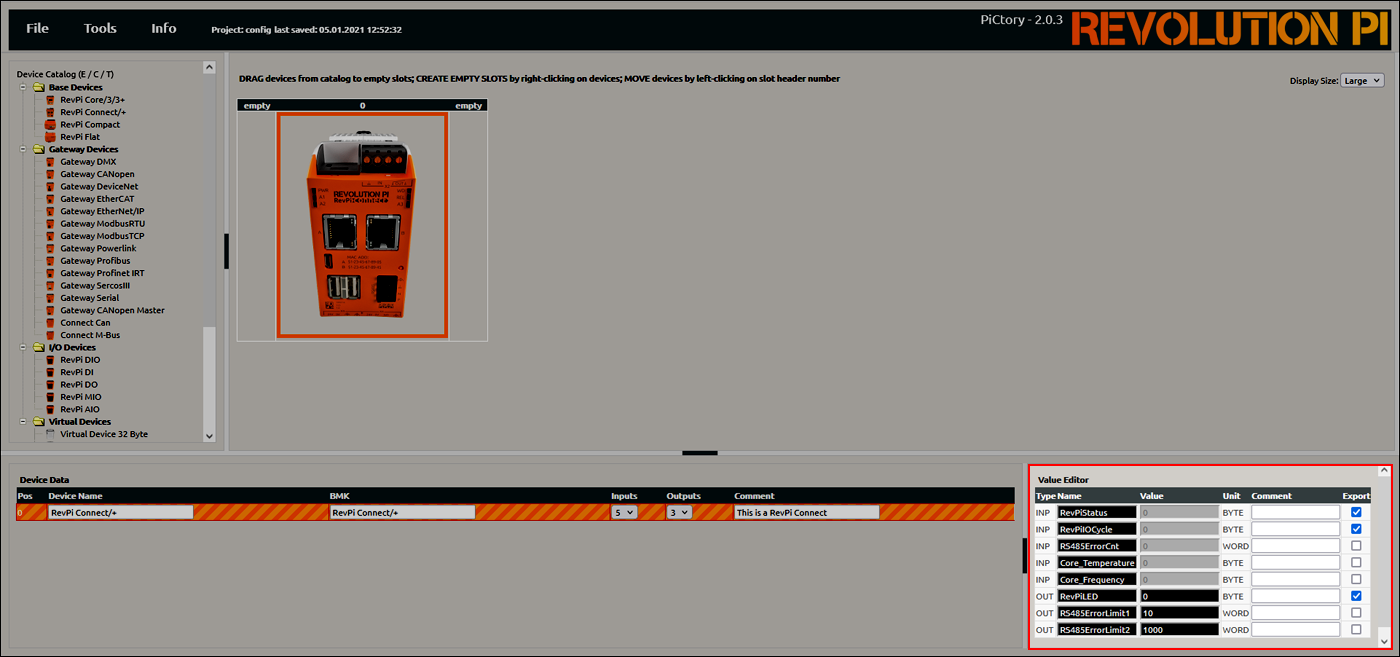
Ein- und Ausgänge konfigurieren (Value Editor) #
Im Value Editor werden die Ein- und Ausgänge des aktuell im Configuration Board markierten Gerätes konfiguriert.
| Typ | Beschreibung |
|---|---|
Type INP |
Werte für die Eingänge (Inputs) |
Type OUT |
Werte für die Ausgänge (Outputs) |
Type MEM |
Werte für die Memory-Variablen, z. B. Betriebsmodi der Ein- und Ausgänge |
Name |
im Prozessabbild hinterlegter Name |
Value |
Wert oder Modus |
Unit |
Einheit des Wertes |
Comment |
internes Kommentarfeld |
Export |
Werte für den Export über eine Kommunikationsschnittstelle aktivieren (z. B. mit MQTT) |
Die konfigurierbaren Werte unterscheiden sich je nach RevPi Gerät:
RevPi Basismodule konfigurieren #
RevPi Virtual Devices konfigurieren #
Konfiguration speichern #
▷ Speichere mit File > Save as Start-Config. die Konfiguration als Startkonfiguration. Die Startkonfiguration wird direkt nach jedem Boot-Vorgang aufgerufen.
▷ Alternativ mit File > Save As die Konfiguration als weitere Konfigurationsdatei auf dem RevPi Basismodul speichern.
▷ Starte mit Tools > Reset Driver den Treiber neu.
❯❯ Das Revolution Pi System ist fertig konfiguriert.
Die Konfigurationseinstellungen des Revolution Pi Systems können mit piTest überprüft werden.
Gespeicherte Konfiguration öffnen #
▷ Wähle mit File > Open eine Konfigurationsdatei aus.
▷ Alternativ mit File > Load Start-Config. die als Startkonfiguration hinterlegte Konfigurationsdatei öffnen.
Konfiguration zurücksetzen #
▷ Setze mit File > Clear die Konfiguration zurück.
Konfiguration exportieren #
Die Konfigurationsdatei kann aus PiCtory exportiert werden, z. B. um sie für andere Programme zu verwenden, zur Datensicherung oder für Simulationszwecke.
▷ Exportiere die Konfiguration mit File > Export.
▷ Definiere Dateinamen und Dateiformat. Mögliche Formate sind:
-
logiCAD3 ST GLOBALS
-
Offset list .txt
-
IBHSoftec symbol list
-
CODESYS offset list
-
LogicLab
▷ Datei exportieren mit Download.
▷ Alternativ Datei anzeigen mit Show Only.
Reset Servicestats #
Startet alle Dienste wie RevPiPyLoad neu.
Reset Layout #
Setzt das Layout der Benutzeroberfläche von PiCtory auf Werkseinstellung zurück.
Reset Driver #
Startet den RevPi Treiber piControl neu. Die in PiCtory gespeicherte Konfiguration steht damit für die Kommunikation mit dem RevPi Gerät zu Verfügung.
Scan for Devices #
Durchsucht verbundene Netzwerke nach erreichbaren Schnittstellen für Modbus auf Port 502.
Set Language #
Sprache der Benutzeroberfläche in PiCtory einstellen.
User Settings #
Benutzereinstellungen für PiCtory:
-
Session Timeout aktivieren / deaktivieren
-
Auto Save aktivieren / deaktivieren
-
Auto Export konfigurieren
-
Cache für Browser aktivieren / deaktivieren