PiCtory is a RevPi application for configuring the modules of your Revolution Pi system, i.e. a RevPi base module with expansion modules. The configuration is stored in /etc/revpi/config.rsc.
The system setup can be managed via a browser according to its arrangement on the DIN rail.
The configuration file managed by PiCtory defines which expansion modules are located at which position in relation to the RevPi base module and how all inputs and outputs are named and configured. The configuration file can also provide this system setting for other programs.
In addition to the expansion modules, Virtual Devices can be integrated for common network protocols or merely as I/O interfaces.
Starting PiCtory #
▷ Open the Cockpit menu Revolution Pi.
▷ Select Open for the RevPi app PiCtory.
❯❯ PiCtory opens.
| Position | Work Area | Function |
|---|---|---|
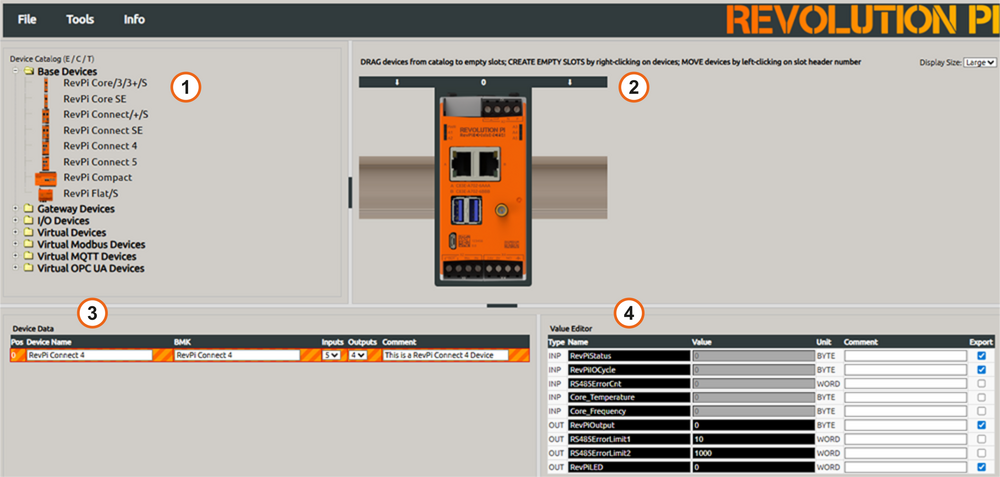
1 |
Device Catalog |
List of all available RevPi devices and Virtual Devices. |
2 |
Configuration area |
Here, you arrange the individual RevPi devices of the Revolution Pi system in the same order as they are arranged on the DIN rail. |
3 |
Device Data |
Configuration of the basic settings of the device currently selected in the configuration area. |
4 |
Value Editor |
Configuration of the parameters of the device currently selected in the configuration area. |
Arranging Devices #
▷ Observe the rules for device arrangement.
▷ Select your RevPi base module from the Device Catalog and drag it into the Configuration Area.
❯ PiCtory loads the selected base module into the configuration area (position number 0) and creates new empty slots.
▷ Drag additional devices to the left or right of the configuration area.
▷ To move a device, select the position number and drag it to the desired position.
▷ To remove a device, open the context menu and select Delete.
Configuring Device Data #
In the Device Data area, the basic settings for the device currently selected in the configuration area can be configured.
| Field | Description |
|---|---|
Device Name |
Optionally change the device name, e.g. if many devices are used and the system data is later processed in another program. |
BMK |
Optionally change the equipment identification number (German: Betriebsmittelkennzeichen). |
Inputs/Outputs |
Define the data schema for the inputs and outputs. |
Comment |
Optionally use the comment column for additional information. |
As default values, PiCtory uses the values stored in the RAP file.
RAP file:
The RAP file (RevPi Adapter Profile) is a device description file used by PiCtory to correctly understand and represent a connected device. It defines the properties of a device.
These include:
Device type and identification Input and output data (I/O structure) Data formats and sizes (e.g., bits, bytes, registers) Addressing within the process image Parameters and configuration options
PiCtory uses this information to:
display the device graphically, create the correct process data, and properly configure the communication between the RevPi and the device.
Without a suitable RAP file, PiCtory cannot integrate a device at all or only with significant limitations.
Configuring Values (Parameterization) #
| Type | Description |
|---|---|
Type INP |
Values for the inputs |
Type OUT |
Values for the outputs |
Type MEM |
Values for the memory variables, e.g. operating modes of the inputs and outputs |
Name |
Name stored in the process image |
Value |
Value or mode |
Unit |
Unit of the value |
Comment |
Internal comment field |
Export |
Activate values for export via a communication interface (e.g. with MQTT) |
The configurable parameters differ depending on the RevPi device:
See also:
Saving the Configuration #
Before the configuration can be used, it must be saved and the driver must be reset.
▷ Select to save the configuration as the start configuration.
❯ The start configuration is called up directly after each boot.
▷ Alternatively, you can save the configuration as another configuration file on the RevPi base module using .
▷ Select to reset the piControl driver.
▷ Check the configuration settings of the Revolution Pi system with piTest.
❯❯ The Revolution Pi system is configured.
Opening Saved Configuration #
▷ Select to choose a configuration file.
▷ Alternatively, you can open the configuration file stored as the start configuration with .
Resetting Configuration #
▷ Select to reset the configuration.
Exporting Configuration #
▷ Select to export the configuration file, e.g. to use it for other programs, for data backup, or for simulation purposes.
▷ Select the desired export format and enter the file name in Export Filename.
▷ Select Download to export the file.
▷ Alternatively, you can display the file with Show Only.
Reset Service Status #
Restarts all services such as RevPiPyLoad.
Reset Layout #
Resets the PiCtory user interface layout to the factory settings.
Reset Driver #
Restarts the RevPi driver piControl.
The configuration saved in PiCtory is then available for communication with the RevPi device.
Select Language #
Sets the language of the user interface in PiCtory.
User Settings #
User settings for PiCtory.
Session Timeout
After the specified number of minutes, an inactive user is automatically logged out.
To prevent data loss, Auto Save should always be enabled when a Session Timeout is configured. Changes take effect only after restarting PiCtory.
Auto Save
After the configured number of minutes, the current project file is saved automatically.
Auto Save should always be set shorter than Session Timeout.
Auto Export
▷ Define the files that are exported automatically when the project is saved.
-
PiCtory project file: RevPi module configuration in PiCtory format (config.rsc).
-
ST GLOBALS for logiCAD3: Structured Text for the GLOBALS section according to IEC 61131-3.
-
Offset list: Text list with the names and byte/bit offsets of the values marked for export in the Value Editor.
-
Symbol list for IBHSoftec: Text list with the names and byte/bit offsets of the values marked for export.
-
Offset list for CODESYS: Text list with the names and byte/bit offsets of the values marked for export.
Cache
▷ Enable or disable browser caching.
▷ Leave the cache mode set to On to achieve the best performance of PiCtory during normal operation.
▷ Set the cache mode to Off if RAP files are frequently edited in the background while PiCtory is running.
|
Note
|
If caching is set to On, RAP files are loaded by PiCtory from cache instead of using the latest edited version. This can lead to unwanted and unexpected effects when testing changes to the RAP file. |