RevPi DIO
Produktbeschreibung
Das RevPi DIO ist ein Erweiterungsmodul der Revolution Pi Familie und besitzt 14 digitale Ein- und 14 digitale Ausgänge, um Aktoren und Sensoren anzuschließen.
Aufbau
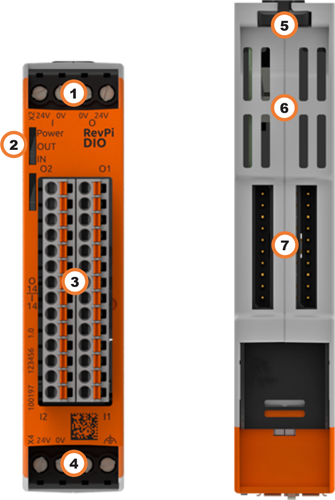
| Position | Komponente | Verwendung |
|---|---|---|
| 1 | X2-Stecker | Spannungsversorgung anschließen |
| 2 | 3 × Status-LED | LEDs |
| 3 | 14 × Digitaler Eingang, 14 × Digitaler Ausgang | Pinbelegung, Digitale Ein- und Ausgänge |
| 4 | X4-Stecker | Spannungsversorgung anschließen |
| 5 | Arretierklammern | Gerät auf einer Hutschiene montieren |
| 6 | Lüftungsschlitze | Gerät auf einer Hutschiene montieren |
| 7 | 2 × PiBridge | Erweiterungsmodule anschließen |
Pinbelegung
Das RevPi DIO verfügt über 28 GPIO-Schnittstellen, davon 14 Eingänge und 14 Ausgänge.
Die Pins am Steckverbinder sind wie folgt belegt:
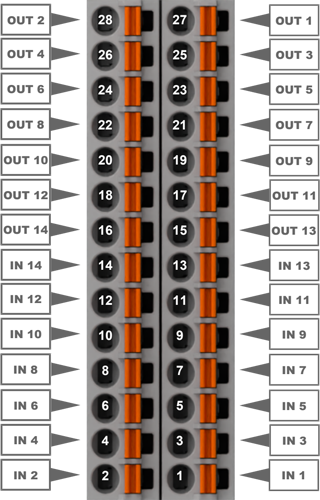
Für die Konfiguration siehe RevPi DIO im PiCtory Value Editor konfigurieren.
LEDs
Die LEDs zeigen verschiedene Gerätestatus an.
Power
| Signal | Bedeutung |
|---|---|
| Grün | Die Verbindung zum RevPi Basismodul ist hergestellt. |
| Blinkt rot | Die Verbindung zum RevPi Basismodul ist im Aufbau (Initialisierungsphase). |
| Rot | Die Verbindung zum RevPi Basismodul wurde unterbrochen. |
OUT
| Signal | Bedeutung |
|---|---|
| Aus | Es wurde noch keine Verbindung zum RevPi Basismodul hergestellt (Initialisierungsphase). |
| Grün | Ausgänge sind betriebsbereit. |
| Blinkt rot | Fehler an den Ausgängen. |
| Rot | Keine oder zu niedrige Versorgungsspannung. |
IN
| Signal | Bedeutung |
|---|---|
| Aus | Es wurde noch keine Verbindung zum RevPi Basismodul hergestellt (Initialisierungsphase). |
| Grün | Eingänge sind betriebsbereit. |
| Blinkt rot | Fehler an den Eingängen. |
| Rot | Keine oder zu niedrige Versorgungsspannung. |
Kompatible Basismodule
- RevPi Connect 5
- RevPi Connect 4
- RevPi Connect SE (nur linke Seite)
- RevPi Connect+ (nur linke Seite)
- RevPi Connect S (nur linke Seite)
- RevPi Core (alle Varianten)
Siehe Regeln für die Geräteanordnung.
Lieferumfang
Im Lieferumfang enthalten sind
- RevPi Erweiterungsmodul
- PiBridge-Steckverbinder
- X2-Stecker
- X4-Stecker
- 2 × 14-polige I/O-Steckerleiste
- 2 × Abschlussstecker für PiBridge
Montage und Anschluss
Der RevPi wurde für den Einsatz in einem Schaltschrank entwickelt. Beachte die Vorgaben für den bestimmungsgemäßen Gebrauch und alle Sicherheitshinweise.
Lebensgefahr durch elektrischen Schlag
Bei Arbeiten an Geräten im Schaltschrank unter Beteiligung von 230-V-Netzspannung besteht tödliche Stromschlaggefahr.
▷ Arbeiten im Schaltschrank nur von Elektrofachkräften durchführen lassen.
▷ Vor allen Arbeiten im Schaltschrank die Spannungsversorgung ordnungsgemäß abschalten.
Führe die Montage und den Anschluss in folgender Reihenfolge aus:
-
Montiere das RevPi Basismodul und alle Erweiterungsmodule auf einer Hutschiene.
-
Schließe das Erweiterungsmodul über PiBridge-Steckverbinder an.
-
Schließe alle sonstigen Geräte wie Sensoren und Aktoren an.
-
Schließe zuletzt die Spannungsversorgung für das RevPi DIO und für die Ein- und Ausgänge an.
Spannungsversorgung anschließen
Anschluss Spannungsversorgung RevPi DIO
Für die Spannungsversorgung des Erweiterungsmoduls RevPi DIO ist eine Verkabelung über den X4-Stecker notwendig, siehe Spannungsversorgung anschließen.
Diese Spannungsversorgung kann über den X4-Anschluss des RevPi Basismoduls aus der gleichen Spannungsquelle erfolgen. Das RevPi DIO benötigt 1,5 W zuzüglich der Leistungsaufnahme der angeschlossenen Sensoren und Aktoren.
Anschluss Spannungsversorgung Ein- und Ausgänge
Beschädigung des Geräts durch unterschiedliche Erdungen
▷ Alle Anschlüsse auf den gleichen System-Ground beziehen.
▷ Externe Spannungseingängen oder -ausgängen mit unterschiedlichen Erdungen extern verbinden.
Für die Spannungsversorgung der Ein- und Ausgänge am RevPi DIO ist eine Verkabelung über den X2-Stecker notwendig. Ein- und Ausgänge sind galvanisch voneinander getrennt. Angeschlossene Sensoren und Aktoren können direkt über die Ein- und Ausgänge des RevPi DIO mit 12 … 24 V versorgt werden. Pro Anschluss dürfen maximal 12 W Leistung zusätzlich anfallen.
| Pin | Belegung | X2-Stecker |
|---|---|---|
| 1 | 24-V-Einspeisung für die Ausgänge | 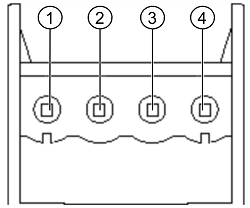 |
| 2 | Ground für die Ausgänge | |
| 3 | Ground für die Eingänge | |
| 4 | 24-V-Einspeisung für die Eingänge |
Konfiguration
Die RevPi Erweiterungsmodule werden innerhalb der Systemkonfiguration mit PiCtory konfiguriert.
RevPi DIO in PiCtory konfigurieren
Für das RevPi DIO stehen 28 GPIO-Schnittstellen, 14 Eingänge und 14 Ausgänge, zum Einlesen und Ausgeben von Signalen zur Verfügung. Diese können über PiCtory im Value Editor konfiguriert werden.
Beachte die Pinbelegung.
▷ Aus dem Device Catalog > I/O Devices den RevPi DIO an den richtigen Slot in das Revolution Pi System auf dem Configuration Board einfügen.
▷ Ggf. Basiskonfiguration des RevPi DIO unter Device Data anpassen.
▷ Im Value Editor die Einstellwerte konfigurieren (siehe unten).
▷ Mit File > Save as Start-Config. die Konfiguration speichern.
▷ Mit Tools > Reset Driver den Treiber neu starten.
INP Input Values
| Parameter | Offset | Beschreibung |
|---|---|---|
| I_1 … 14 | Offset: 0 | Zeigt die aktuellen Werte der Eingänge (Bits 0 … 13). I_15 und I_16 sind nicht belegt. Mit Datenschema 19 werden alle Werte in einem 16-Bit-Value Input angezeigt (siehe PiCtory Device Data). |
| Output_Status | Offset: 2 | Zeigt den aktuellen Status der Ausgänge 1 … 14 an (Bits 0 … 13). 1: Fehler am Ausgang (Übertemperatur, Überlast etc.) 0: kein Fehler |
| Status | Offset: 4 | Zeigt den Status des Erweiterungsmoduls an. Bit 0: Keine Kommunikation zum Eingangsbaustein Bit 1: Unterspannung UV1 <7 V Eingang 1 … 8 Bit 2: Unterspannung UV2 <14 V Eingang 1 … 8 Bit 3: Übertemperatur >135 °C Eingang 1 … 8 Bit 4: Unterspannung UV1 <7 V Eingang 9 … 16 Bit 5: Unterspannung UV2 <14 V Eingang 9 … 16 Bit 6: Übertemperatur >135 °C Eingang 9 … 16 Bit 7: Fehlermeldung Eingangsbaustein Bit 8: Keine Kommunikation zum Ausgangsbaustein Bit 9: Ausgangsbaustein meldet CRC-Fehler Bit 10: Fehlermeldung Ausgangsbaustein Bit 11 … 15: – |
| Counter_1 … 15 | Offset: 6 | Optional Eingänge als Encoder (Drehwertgeber) konfigurieren und Zählerfunktion zuschalten. |
OUT Output Values
| O_1 … 14 | Offset: 70 | Bits 0 … 13 zeigen die aktuellen Werte der Ausgänge 1 … 14. Mit Datenschema 17 werden alle Werte in einem 16-Bit-Value Output angezeigt (siehe PiCtory Device Data). |
| PWM_1 … 14 | Offset: 72 | Aktuelle PWM-Werte in % für Ausgänge 1 … 14. Nur gültig, wenn für den jeweiligen Ausgang die PWM-Funktion aktiviert ist. |
MEM Memory Values
| InputMode_1 … 14 | Offset: 88 | Auswahl des Modus für den jeweiligen Eingang.Direct: Aktueller Wert am Eingang wird angezeigt.Counter, rising edge: Am Eingang werden die steigenden Flanken gezählt.Counter, falling edge: Am Eingang werden die fallenden Flanken gezählt.Encoder: Eingänge als Encounter verwenden. |
| InputDebounce | Offset: 104 | Zeit für Entprellfilter an allen Eingängen einstellen. |
| OutputPushPull | Offset: 106 | Ausgänge im Pushpull- oder im Highside-Modus betreiben. |
| OutputOpenLoadDetect | Offset: 108 | Open-load-Erkennung aktivieren / deaktivieren. |
| OutputPWMActive | Offset: 110 | Ausgänge für PWM aktivieren, siehe PWM aktivieren. |
| OutputPWMFrequency | Offset: 112 | PWM-Frequenz für alle Ausgänge definieren, siehe PWM aktivieren. |
Counter konfigurieren
Optional für jeden der 14 Eingänge eine Zählerfunktion einstellen, z. B. wie oft ein Drehkreuz oder ein Taster betätigt wurde. Für jeden Zähler wird ein 32-Bit-Wert im Prozessabbild eingetragen. Der aktuelle Zählerwert wird als Signed-32-bit-Wert zurückgegeben.
Encounter konfigurieren
Jeweils zwei Eingänge zusammen können als Encoder (Drehwertgeber) konfiguriert werden, z. B. um in Kombination mit der PWM-Funktion Teile von Mengen steuern zu können. Maximal 5 Encoder pro RevPi DIO sind möglich.
Die Eingänge müssen immer paarweise verwendet werden, beginnend mit einem ungeraden Eingang, z. B. Eingang 1 und 2 oder Eingang 3 und 4.
▷ Unter MEM InputMode den Value auf Encounter einstellen. Der darauffolgende Eingang ist damit automatisch ebenfalls als Encounter konfiguriert.
❯❯ Der aktuelle Encoder-Wert wird als Signed-32-bit-Wert im ersten Eingang zurückgegeben.
PWM (Pulsweitenmodulation) aktivieren
Für jeden der 14 Ausgänge kann optional eine PWM-Funktion aktiviert werden. Mit PWM wird statt einem Bit pro Kanal ein ganzer Bytewert von 0 … 100 ausgegeben, der in % die Pulsweite am Ausgang definiert. Die PWM-Funktion ist hilfreich, um Teile von Mengen zu steuern, z. B. eine Wasserzufuhr zu regulieren oder Lichter zu dimmen.
▷ Im Value Editor unter MEM OutputPWMActive definieren, für welche der 14 Ausgänge die PWM aktiviert werden soll.
Beispiel: Soll für die Ausgänge 1 und 2 die PWM aktiviert werden, dann den Dezimalwert 3 eintragen.
❯ Somit können statt der Ausgänge O_1 und O_2 nun die korrespondierenden Ausgänge PWM_1 und PWM_2 verwendet werden.
▷ Unter MEM OutputPWMFrequency festlegen, mit welcher Frequenz das PWM-Signal erzeugt werden soll. Pro RevPi Erweiterungsmodul kann eine PWM-Frequenz festgelegt werden:
| PWM-Frequenz | Tastgrad |
|---|---|
| 40 Hz | 1 % |
| 80 Hz | 2 % |
| 160 Hz | 4 % |
| 200 Hz | 5 % |
| 400 Hz | 10 % |
▷ Für die als PWM aktivierten Ausgänge OUT PMW_1 … 14 den gewünschten PWM-Wert in % eintragen.
▷ Mit File > Save as Start-Config. die Konfiguration speichern.
▷ Mit Tools > Reset Driver den Treiber neu starten.
Alternativ mit piTest die PWM-Ausgänge mit dem Befehl -w ansprechen.